
Nonparametric estimation of time-varying reproduction numbers
Daniel J. McDonald
Department of Statistics, The University of British Columbia
Mathematical modelling of disease / epidemics is very old
- Daniel Bernoulli (1760) - studies inoculation against smallpox
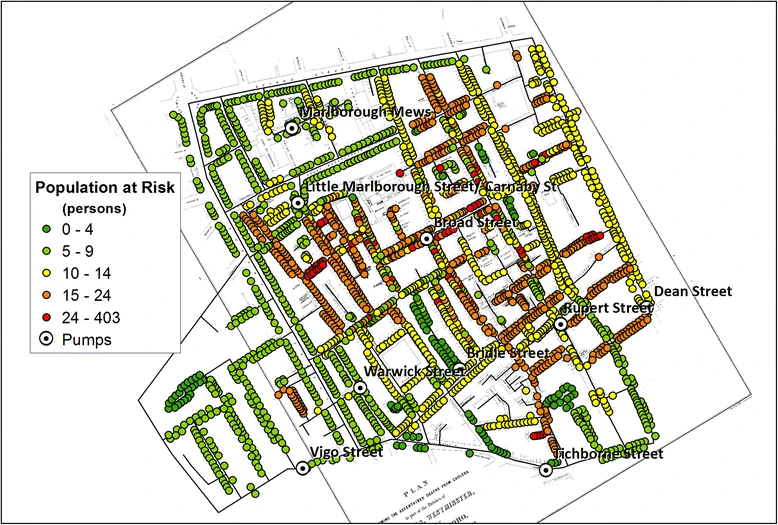
- John Snow (1855) - cholera epidemic in London tied to a water pump
- Ronald Ross (1902) - Nobel Prize in Medicine for work on malaria
- Kermack and McKendrick (1927-1933) - basic epidemic (mathematical) model
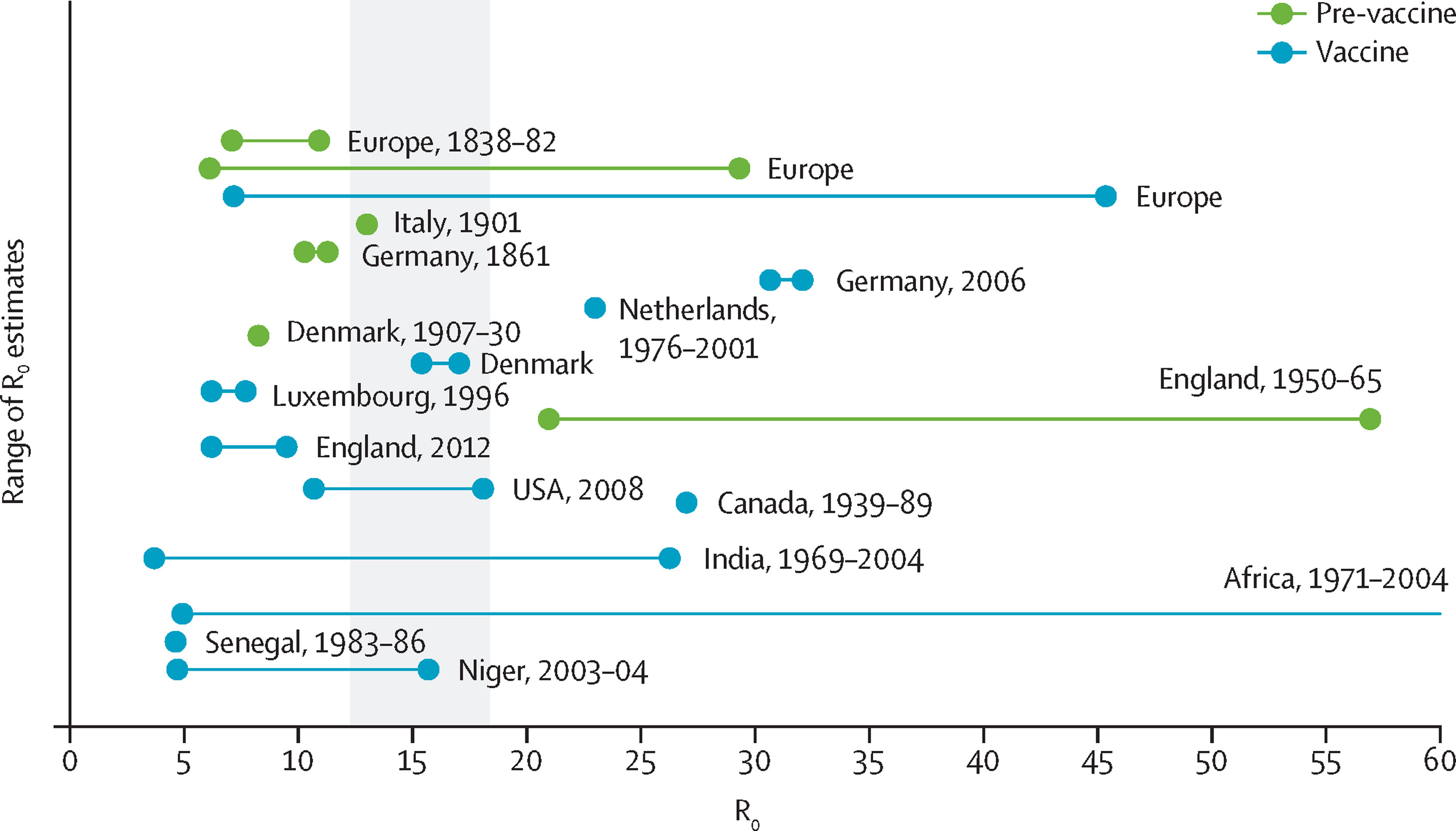
\(R_0\) basic reproduction number
Dates at least to Alfred Lotka (1920s) and others (Feller, Blackwell, etc.)
The expected number of secondary infections due to a primary infection
- \(R_0 < 1\) ⟹ the epidemic will die out
- \(R_0 > 1\) ⟹ the epidemic will grow until everyone is infected

\(R_0\) is entirely retrospective
It’s a property of the pathogen in a fully susceptible (infinite) population
Each outbreak is like a new sample
To estimate something like this from data, the “bonehead” way is to
- Wait until the epidemic is over (no more infections circulating)
- Contact trace the primary infection responsible for each secondary infection
- Take a sample average of the number caused by each primary
- Possibly repeat over many outbreaks
Of course no one actually does that
Lots of work on how to estimate \(R_0\)
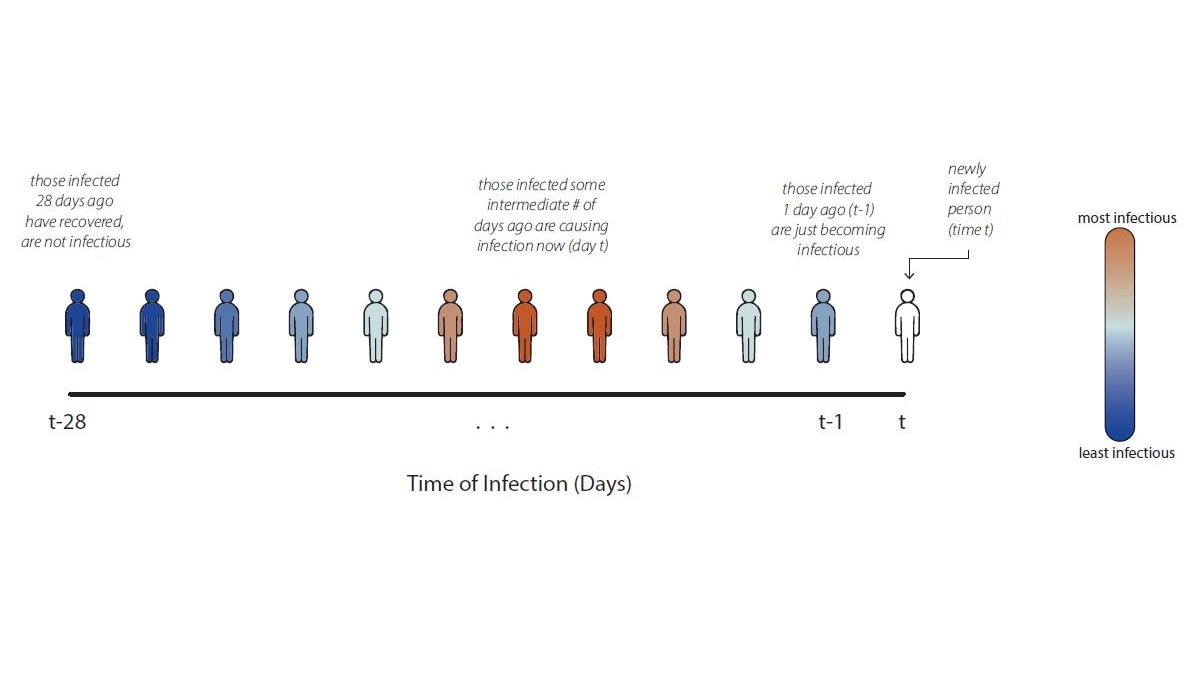
The generation interval distribution \(g(a)\)
SIR-type (compartmental) models - Stochastic Version
Suppose each of N people in a bucket at time t:
Susceptible(t) : not sick, but could get sick
Infected(t) : sick, can make others sick
Removed(t) : recovered or dead; not sick, can’t get sick
- During period \(h\), each \(S\) meets \(kh\) people.
- Assume \(\mathbb{P}( S \textrm{ meets } I \textrm{ and becomes } I ) = c\).
- Then \(\mathbb{P}( S(t) \rightarrow I(t+h) ) = 1 - (1 - c I(t) / N )^{hk} \approx kchI(t) / N\).
- Therefore, \(I(t+h) \mid S(t),\ I(t) \sim \textrm{Binom}(S(t),\ kchI(t) / N)\).
- Assume \(\mathbb{P}( I(t) \rightarrow R(t+h)) = \gamma h,\ \forall t\).
- Then \(R(t+h) \mid I(t) \sim \textrm{Binom}(I(t),\ \gamma h)\).

SIR-type (compartmental) models - Stochastic Version
\[\begin{aligned} x(t+h) &\sim \mathrm{Binom}\left(S(t),\ \frac{\beta}{N} h I(t)\right) = \text{incident infections}\\ z(t+h) &\sim \mathrm{Binom}\left(I(t),\ \gamma h\right) = \text{incident recoveries}\\ S(t+h) & = S(t) - x(t+h)\\ I(t+h) & = I(t) + x(t+h) - z(t+h)\\ R(t+h) & = R(t) + z(t+h) \end{aligned}\]
In the deterministic limit, \(h\rightarrow 0\)
\[\begin{aligned} \frac{\mathsf{d}}{\mathsf{d}t}S(t) & = -\frac{\beta}{N} S(t)I(t)\\ \frac{\mathsf{d}}{\mathsf{d}t}I(t) & = \frac{\beta}{N} I(t)S(t) - \gamma I(t)\\ \frac{\mathsf{d}}{\mathsf{d}t}R(t) & = \gamma I(t) \end{aligned}\]
THE SIR model is often ambiguous between these.
Typically, people mean the deterministic, continuous time version.
\(R_t\) in compartmental models
There is an equivalence between a compartmental model and the renewal equation.
\[\begin{aligned} R_0 &= \beta\ /\ \gamma\\ x_{t+1} &= \beta \frac{S_{t}}{N} \sum_{k = 0}^{t-1} \big[(1-\gamma)^{k}\big] x_{t-k} = R_0 \frac{S_{t}}{N} \sum_{k = 0}^{t-1} \big[\gamma(1-\gamma)^{k}\big] x_{t-k} = R_{t}\sum_{k = 0}^{t-1} g(k)x_{t-k} \end{aligned}\]

\(R_t\) for Influenza

Source: US CDC Center for Forecasting Analytics
Data issues
\(x_t\) is incident infections, but we don’t ever see those
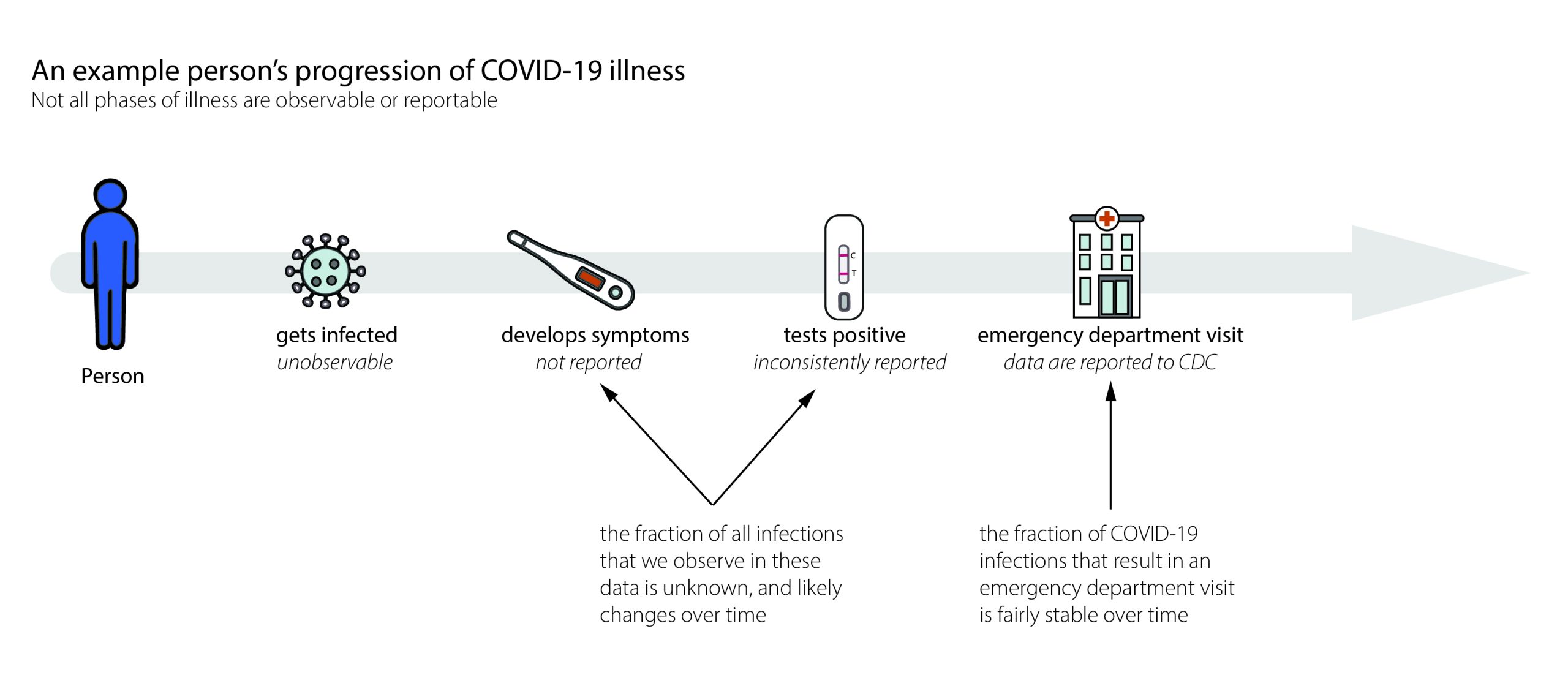
- Replace infections with cases
- Replace generation interval with serial interval
- Assume we have the serial interval
Serial interval distribution

Local adaptivity — \(\ell_1\) vs. \(\ell_2\)

Polynomial order, \(k=1\)
\[
\begin{aligned}
D^{(2)} &= \begin{bmatrix}
1 & -2 & 1 & & & \\
& 1 & -2 & 1 & & \\
& & & \ddots && \\
& & & 1 & -2 & 1
\end{bmatrix} \\ \\
&= D^{(1)}D^{(1)}\\ \\
&\in \mathbb{R}^{(n-k-1)\times n}
\end{aligned}
\]

Polynomial order, \(k=2\)
\[\begin{aligned}
D^{(3)} &= \begin{bmatrix}
-1 & 3 & -3 & 1 & & \\
& -1 & 3 & -3 &1 & \\
& & & \ddots && \\
& & -1 & 3 & -3 & 1
\end{bmatrix} \\ \\
&= D^{(1)}D^{(2)}\\ \\
&\in \mathbb{R}^{(n-k-1)\times n}
\end{aligned}\]

Canadian Covid-19 cases

\(R_t\) for Canadian Covid-19 cases

Reconvolved Canadian Covid-19 cases

Example simulations for different methods

{rtestim} software

Guts are in C++ for speed
Lots of the usual S3 methods
Approximate “confidence” bands
\(\widehat{R}\) is a member of a function space
Arbitrary spacing of observations
Built-in cross validation
Time-varying delay distributions
{rtestim} software
Guts are in C++ for speed
Lots of the usual S3 methods
Approximate “confidence” bands
\(\widehat{R}\) is a member of a function space
Arbitrary spacing of observations
Built-in cross validation
Time-varying delay distributions

Approximation + Delta method gives
\[ \textrm{Var}(\widehat{R}) = \left(\textrm{diag}(\widehat{y}) + \lambda D^{\mathsf{T}}D\right)^{\dagger} \left(\frac{1}{\eta^2}\right) \]
{rtestim} software
Guts are in C++ for speed
Lots of the usual S3 methods
Approximate “confidence” bands
\(\widehat{R}\) is a member of a function space
Arbitrary spacing of observations
Built-in cross validation
Time-varying delay distributions

The solution is an element of the space of discrete splines of order \(k\) Tibshirani 2020
- Lets us interpolate (and extrapolate) to off-observation points
- Lets us handle uneven spacing
{rtestim} software
Guts are in C++ for speed
Lots of the usual S3 methods
Approximate “confidence” bands
\(\widehat{R}\) is a member of a function space
Arbitrary spacing of observations
Built-in cross validation
Time-varying delay distributions


{rtestim} software

Summary and collaborators
Contributions
- Framework for \(R_t\) estimation
- Naturally imposes smoothness
- Fast, extensible, easy to use
- Has “confidence” bands
Future work
- Allow Negative Binomial likelihood
- Deconvolve incidence
- Forecast
- Mixed smoothness behaviours
- Figure out CV for convolution
- Better confidence bands
- Use relationship with growth rate
Collaborators and funding





